科技是第一生產(chǎn)力、人才是第一資源、創(chuàng)新是第一動力。
創(chuàng)新是社會進步的靈魂,創(chuàng)業(yè)是推動經(jīng)濟社會發(fā)展、改善民生的重要途徑。青年大學生富有想象力和創(chuàng)造力,是國家創(chuàng)新創(chuàng)業(yè)人才的源頭活水和有生力量,是建設(shè)科技強國的重要力量。
近年來,以產(chǎn)學研合作為重要抓手,圍繞推動創(chuàng)新成果轉(zhuǎn)化落地、助力形成新業(yè)態(tài)新動能和服務(wù)經(jīng)濟社會高質(zhì)量發(fā)展為目標,來自新疆農(nóng)業(yè)大學機電工程學院(新能源學院)大一(劉旖姍、馮宏智)、大二(紀元、徐勝楠、韋小杏、錢思明、黃宗南)和大三(王志波、戚璞欣悅、齊雙浩)滿懷激情學子,于2024年11月正式成立新疆福農(nóng)智能裝備科技有限公司。聚焦多場景差異化的農(nóng)機通用自主導航關(guān)鍵技術(shù),重點開展跨農(nóng)業(yè)場景下全局、局部和混合自主導航策略研究,開發(fā)消費級通用模塊化自動駕駛系統(tǒng),實現(xiàn)跨場景的導航行走-機具調(diào)控的整機協(xié)同控制的重要突破,為農(nóng)業(yè)智能化和自動化生產(chǎn)開辟了新道路。
圖1 新疆福農(nóng)智能裝備科技有限公司網(wǎng)站官網(wǎng)
自團隊籌備組建以來,團隊成員圍繞消費級低成本的跨場景差異化自主導航模式為研究目標,面向動植物工廠的設(shè)施廊道、大田壟作的壟上智行,提出成本不高于1000元的模塊化、集成化和小型化的系統(tǒng)研發(fā)推廣思路,推動我國跨農(nóng)業(yè)場景的自主導航技術(shù)從“功能展示”向“高性能”應(yīng)用的重大跨越,從而大大推動現(xiàn)代化無人農(nóng)業(yè)的產(chǎn)業(yè)化進程。圍繞設(shè)施/大田兩大作業(yè)場景推出多套模塊化通用導航定位系統(tǒng),重點研發(fā)的沿邊、沿壟導航傳感器在作業(yè)效率、通用化和普及推廣方面取得了重大突破,為多農(nóng)業(yè)場景的差異化自主導航技術(shù)開辟了新的道路。
面向衛(wèi)星導航的“盲作業(yè)”、設(shè)施室內(nèi)作業(yè)失效、環(huán)境感知導航的跨場景泛化能力差、實時性不足等痛點,團隊成員自發(fā)組建“田路行者”創(chuàng)新小組,開展多農(nóng)業(yè)場景行壟自主導航關(guān)鍵技術(shù)與系統(tǒng)集成創(chuàng)新方法和關(guān)鍵技術(shù)的深度研究,重點攻克現(xiàn)有衛(wèi)星導航“盲作業(yè)”、局部感知導航跨場景適用性差、沿邊/沿壟相對位姿檢測模型欠缺三大難題,創(chuàng)制2套模塊化通用沿邊/沿壟位姿檢測系統(tǒng),通過差異化場景檢測方案、內(nèi)嵌程序-算法數(shù)據(jù)處理和模塊化結(jié)構(gòu)建模組合創(chuàng)新設(shè)計,構(gòu)建了“機械-電控-智能”一體化的整體解決方案,形成了小型集成化的設(shè)施廊道-大田壟上導航定位系統(tǒng),突破市場現(xiàn)有技術(shù)存在場景適用性差、系統(tǒng)性能弱、通用化模塊產(chǎn)品缺的三大桎梏。
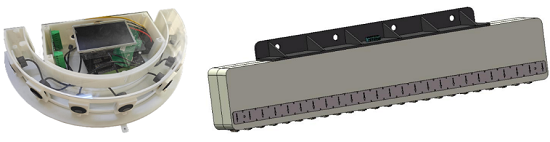
圖2 模塊化通用沿邊/沿壟位姿檢測系統(tǒng)
團隊研發(fā)成員由富有年輕活力的青年大學生構(gòu)成,通過一線年輕教師和豐富閱歷的老教授的親身指導、項目組成員所在教學學院的郭俊先院長大力支持,成長速度喜人,短短幾年時間實現(xiàn)多套模塊化導航系統(tǒng)開發(fā),陸續(xù)下田開展算法性能測試、整機性能測試,并在安徽、湖南、廣西、山東等省市10多家農(nóng)機公司和3家農(nóng)業(yè)合作社開展聯(lián)合應(yīng)用性能測試和示范應(yīng)用推廣。所研發(fā)的系統(tǒng)先后開展了國家級、省部級科技成果查新,引起了多家行業(yè)內(nèi)技術(shù)投資公司的廣泛關(guān)注和強烈的反響共鳴。
圖3 多農(nóng)業(yè)場景行壟自主導航關(guān)鍵技術(shù)與系統(tǒng)集成科技成果查新
伴隨著技術(shù)的不斷創(chuàng)新突破,團隊成員不斷從實踐中尋找問題和不足,致力于研究插接式的多源信息融合通用自主導航系統(tǒng)架構(gòu),以引領(lǐng)跨場景通用化農(nóng)機自主導航技術(shù)發(fā)展和行業(yè)短板問題突破為使命,協(xié)同安徽視動、重慶新翼創(chuàng)、開點信息、安徽信必達等多家技術(shù)研發(fā)公司,開展專用設(shè)施廊道-大田壟作的位姿檢測技術(shù)與通用化系統(tǒng)集成創(chuàng)新方法和關(guān)鍵技術(shù)研究,全力加速多農(nóng)業(yè)場景差異化自主導航技術(shù)的高速發(fā)展和戰(zhàn)略升級。

圖4 現(xiàn)場采訪新疆農(nóng)業(yè)大學機電工程學院(新能源學院)教師解彬彬博士
項目組指導老師新疆農(nóng)業(yè)大學機電工程學院(新能源學院)解彬彬博士表示,要助力打造一支有創(chuàng)意、敢挑戰(zhàn)、能吃苦和肯奮斗的大學生創(chuàng)新創(chuàng)業(yè)團隊,在未來3年內(nèi)實現(xiàn)“開發(fā)→實驗→產(chǎn)品”三級跳,實現(xiàn)從功能性展示到實質(zhì)性應(yīng)用的重大突破,構(gòu)筑“以本為本、引本創(chuàng)新”的典型模范,讓我們的大學生技術(shù)創(chuàng)新突破紙面、讓我們大學創(chuàng)業(yè)走向社會!




