在智能交通系統(tǒng)領(lǐng)域,,車輛重識別(匹配)技術(shù)的研究一直是一個熱點(diǎn)問題。近期,,針對車牌識別(ALPR)數(shù)據(jù)存在的未識別和識別錯誤因素,,導(dǎo)致上下游車輛不能匹配的問題,一項(xiàng)基于行程時間概率積最大化的車輛匹配算法取得了顯著成果,。該成果以“A Vehicle Matching Algorithm by Maximizing Travel Time Probability Based on Automatic License Plate Recognition Data”為題發(fā)表于《IEEE Transactions on Intelligent Transportation Systems》,。
該研究由我校交通與物流工程學(xué)院何春光博士團(tuán)隊(duì)完成,旨在通過提高車輛在多個監(jiān)控攝像頭間車輛的匹配準(zhǔn)確性,,從而獲取更準(zhǔn)確的交通信息,。
隨著城市交通監(jiān)控系統(tǒng)的普及,如何有效地利用ALPR數(shù)據(jù)進(jìn)行車輛重識別成為了一個亟待解決的問題,。如圖1所示,,由于車牌識別錯誤和未識別問題的存在,傳統(tǒng)的車輛匹配方法面臨挑戰(zhàn),。

圖1 車牌識別錯誤
研究團(tuán)隊(duì)提出了一個包含多個模塊的車輛匹配算法,,包括行程時間分布估計(jì)、行程時間概率計(jì)算,、行程時間置信區(qū)間和匹配時間窗口大小的計(jì)算,、限定模糊匹配以及匹配優(yōu)化模型等。如圖2所示,,該研究通過在不同光照和天氣條件下收集的ALPR數(shù)據(jù)進(jìn)行算法評估;如圖3所示,,論文通過實(shí)際收集高清視頻數(shù)據(jù)和車牌識別數(shù)據(jù)進(jìn)行實(shí)證研究,,結(jié)果表明該算法在各種條件下均表現(xiàn)出優(yōu)越的性能,如圖4,、圖5所示,。
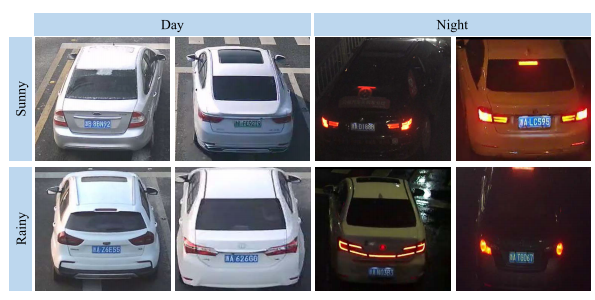
圖2 不同天氣和光照條件車牌拍攝情況
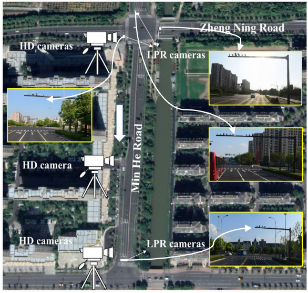
圖3 實(shí)際收集高清視頻數(shù)據(jù)和車牌識別數(shù)據(jù)進(jìn)行實(shí)證研究
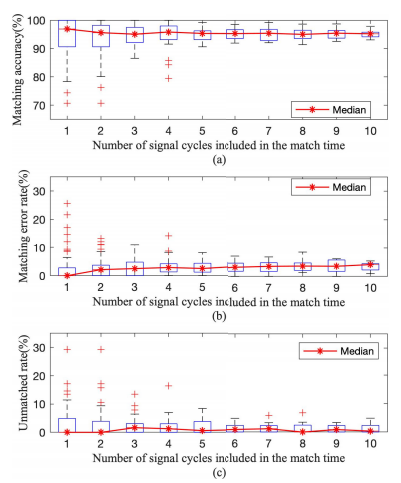
圖4不同匹配時間窗大小下的評價指標(biāo)箱線圖

圖5 不同參數(shù)組合的匹配準(zhǔn)確率
該研究的主要創(chuàng)新點(diǎn)在于首次提出了使用ALPR數(shù)據(jù)基于行程時間概率積最大化的車輛匹配算法。該算法不僅考慮了識別錯誤和未識別問題,,而且不需要額外的數(shù)據(jù)和交通流量假設(shè),,能夠自動計(jì)算行程時間概率,并基于此進(jìn)行車輛匹配。該算法有效解決了在識別錯誤和未識別情況下的車輛匹配問題,,對于提高交通流量監(jiān)測的準(zhǔn)確性和效率具有重要意義,,為車牌識別數(shù)據(jù)的深層次應(yīng)用奠定理論基礎(chǔ)。
該研究得到了浙江省“先鋒”和“領(lǐng)頭雁”研發(fā)計(jì)劃(2023C01240,、2023C03155),、國家自然科學(xué)基金(52131202、 71901193,、52072340)等項(xiàng)目的支持,。




