紅花是重要的特色經(jīng)濟(jì)作物之一,結(jié)有多簇體積小,、數(shù)量多,、緊湊密集的紅花絲,。在紅花采摘機(jī)器人紅花采摘過程中,,花絲為機(jī)器人提供紅花生長狀況的重要信息。而花絲分割結(jié)果是視覺相機(jī)實(shí)時(shí)感知采摘點(diǎn)并精準(zhǔn)定位的關(guān)鍵,。然而,,在復(fù)雜環(huán)境中花絲分割結(jié)果的質(zhì)量往往受到噪聲、光照強(qiáng)度的變化,、紅花整體尺度和植物陰影等因素的影響,。同樣,采摘部位顏色與果球或葉片相似,,難以準(zhǔn)確地進(jìn)行精確識(shí)別和定位,。因此,研究紅花采摘機(jī)器人利用機(jī)器視覺技術(shù)實(shí)時(shí),、準(zhǔn)確定位采摘點(diǎn),,對(duì)提高采摘效率和質(zhì)量具有重要的意義。
近日,,新疆農(nóng)業(yè)大學(xué)機(jī)電工程學(xué)院張振國副教授團(tuán)隊(duì)在《Computers and Electronics in Agriculture》在線發(fā)表一篇題為"Filament-necking localization method via combining improved PSO with rotated rectangle algorithm for safflower-picking robots"的研究論文,。該研究表明提出一種基于改進(jìn)粒子群優(yōu)化算法的花絲-縮頸圓形感興趣區(qū)域采摘點(diǎn)自動(dòng)定位方法,。根據(jù)紅花顏色和紋理特性,通過改進(jìn)粒子群優(yōu)化算法提取分割紅花絲最大連通區(qū)域,,進(jìn)而采用基于紅花幾何特征的再分割方法,,確定花絲-縮頸圓形感興趣區(qū)域,并采用Zhang-Suen細(xì)化算法進(jìn)行骨架提取,,設(shè)計(jì)紅花絲采摘點(diǎn)定位方法,,使紅花絲高效、低損的完整采摘,。
為驗(yàn)證該研究改進(jìn)粒子群優(yōu)化算法在復(fù)雜背景下的適應(yīng)性和有效性,,以400幅不同天氣光照下的紅花圖像進(jìn)行檢測。與迭代法和OTSU法的分割結(jié)果對(duì)比,,以此來評(píng)估本文算法的各項(xiàng)性能,。試驗(yàn)結(jié)果表明,與其他方法的分割結(jié)果相比,,該研究方法通過粒子群算法優(yōu)化得到的灰度化處理紅花區(qū)域得到增強(qiáng),,能夠從其他紅花、強(qiáng)光照葉子等的復(fù)雜背景中準(zhǔn)確分割出紅花,。同時(shí),,該研究方法能夠比較有效地克服非均勻光照帶來的強(qiáng)光影響,多云光照條件下仍取得良好的分割效果(圖1),。
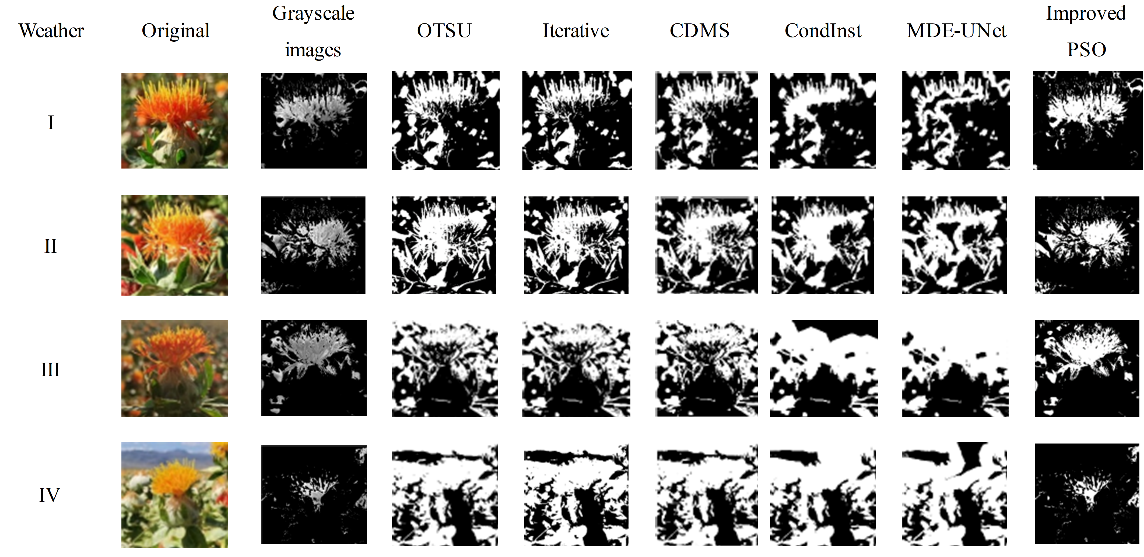
注:Ⅰ. 晴天順光, Ⅱ. 晴天逆光, Ⅲ. 陰天光照, Ⅳ. 多云光照
圖1不同天氣條件下紅花圖像灰度圖及分割結(jié)果
從分割性能指標(biāo)和運(yùn)行時(shí)間上看(圖2),,該研究方法能夠從復(fù)雜自然環(huán)境下分割出較為完整的紅花,具有較強(qiáng)的適應(yīng)性和魯棒性,,實(shí)時(shí)性較好,,分割準(zhǔn)確率較高。
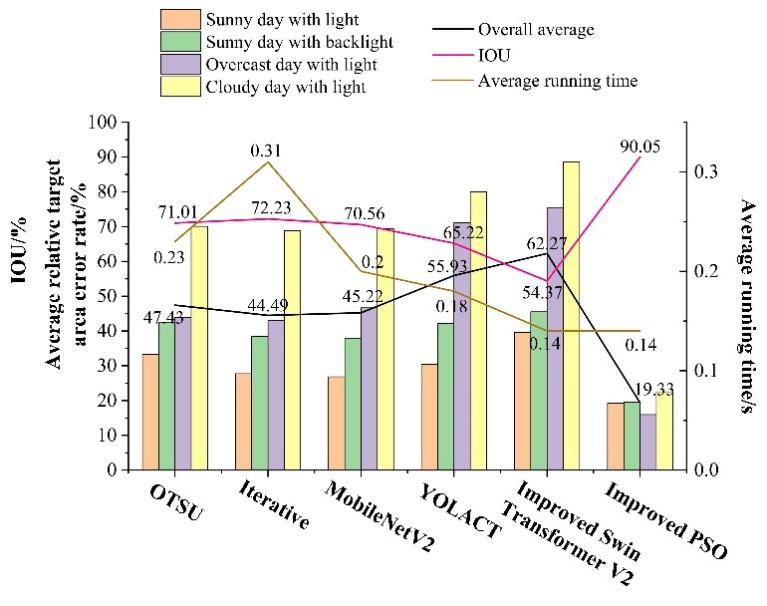
圖2不同算法分割圖像的性能指標(biāo)
該研究選取4種天氣條件下的400幅獨(dú)立驗(yàn)證紅花采摘點(diǎn)定位過程(圖3),,并計(jì)算出4種不同天氣條件下試驗(yàn)圖像的質(zhì)心,、采摘點(diǎn)像素坐標(biāo)、最優(yōu)采摘點(diǎn)所在位置,,計(jì)算采摘點(diǎn)與最優(yōu)采摘點(diǎn)之間的誤差(表1),。試驗(yàn)結(jié)果表明,該研究方法在晴天逆光下求得采摘點(diǎn)/像素與最優(yōu)采摘點(diǎn)之間無誤差,,其定位準(zhǔn)確率略優(yōu)于順光,,原因在于光照條件的變化,逆光作用在紅花圖像上改善了光照強(qiáng)度和亮度,,削弱了強(qiáng)光帶來的背景色差重疊,,更有益于采摘點(diǎn)定位。然而,,晴天順光條件下求得采摘點(diǎn)與最優(yōu)采摘點(diǎn)之間的誤差比晴天逆光條件下多4個(gè)像素。順光作用在紅花圖像上提高了光照強(qiáng)度和亮度,但是紅花的花絲本身與周圍的復(fù)雜環(huán)境相融合,,尤其是其他紅花絲等,,從而導(dǎo)致定位紅花的色差與周圍背景相同。此外,,紅花圖像提取不完整導(dǎo)致紅花絲質(zhì)心計(jì)算誤差太大,,進(jìn)而使采摘點(diǎn)定位出現(xiàn)偏差。
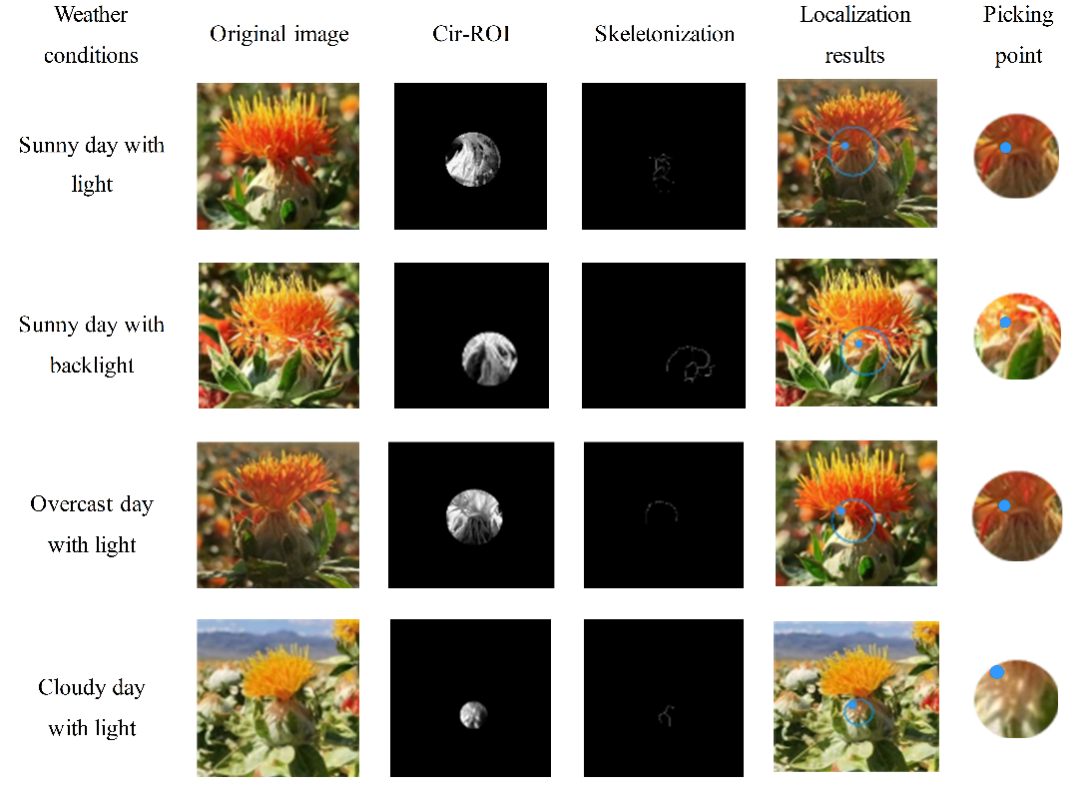
圖3 4種光照下采摘點(diǎn)定位過程
表1采摘點(diǎn)及像素定位誤差表
Weather conditions | Barycenter coordinates/pixel | Optimal picking point range/pixel | Obtain the picking point/pixel | Error/pixel from optimal picking point | Radius | |||||
X3 | Y3 | X | Y | x | y | ex | ey | e | r | |
Sunny day with light | 370 | 271 | 313~463 | 348~428 | 317 | 344 | 0 | 4 | 4 | 172 |
Sunny day with backlight | 319 | 190 | 201~361 | 220~300 | 237 | 250 | 0 | 0 | 0 | 127 |
Overcast day with light | 220 | 135 | 198~348 | 157~237 | 198 | 192 | 0 | 0 | 0 | 167 |
Cloudy day with light | 221 | 194 | 186~336 | 200~280 | 188 | 231 | 0 | 6 | 6 | 63 |
新疆農(nóng)業(yè)大學(xué)機(jī)電工程學(xué)院碩士研究生邢振宇為第一作者,,張振國副教授為通訊作者,。該研究得到了國家自然科學(xué)基金(52265041)和(31901417)、浙江省農(nóng)業(yè)智能裝備與機(jī)器人重點(diǎn)實(shí)驗(yàn)室開放課題(2022ZJZD2202)和新疆農(nóng)業(yè)大學(xué)校級(jí)科研創(chuàng)新項(xiàng)目(XJAUGRI2023021)等項(xiàng)目的資助,。




